Research Interests
My research sits at the crossroads of robotics, learning, and control, with the goal of endowing robots with adaptability, agility, generalizability, and safety.
I leverage both learning-based and model-based approaches to enhance a robot’s perception and physical interaction capabilities.
I am particularly passionate about multi-modal perception, dexterous manipulation, dual-arm manipulation and dynamic task learning in hand–arm configurations.
Looking ahead, I aim to explore loco-manipulation on integrated platforms—such as hand–arm–dog systems, hand–arm–mobile platforms, and humanoid robots—to further advance versatile, real-world robotic applications.
Publications
|
|
|
Tool Center Point Calibration via Posture-Sequence Particle Swarm Optimization
Ziqi Gao, Yingli Li, Yang Luo, Jincheng Sun, Yuhan Ying, Yunxiang Jiang, Xingang Zhao, Yiwen Zhao,
IEEE Sensors Journal,2023
IEEE Sensors Journal
Tool Center Point Calibration via Posture-Sequence Particle Swarm Optimization
|
|
|
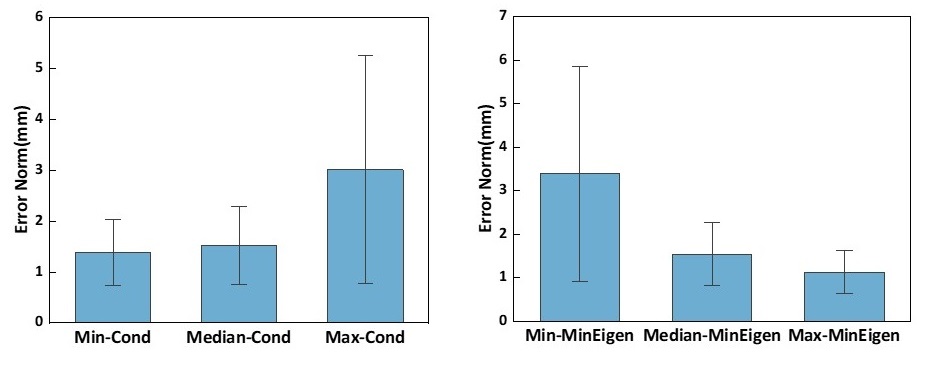
The accuracy analysis of tool center point calibration via condition number and minimum eigenvalue
Ziqi Gao, Yingli Li, Yang Luo, Yunxiang Jiang, Bi Zhang, Xingang Zhao, Lingkai Chen, Yiwen Zhao,
IEEE International Conference on Real-time Computing and Robotics (RCAR), (Oral Presentation) 2023
The accuracy analysis of tool center point calibration via condition number and minimum eigenvalue
|
|
|
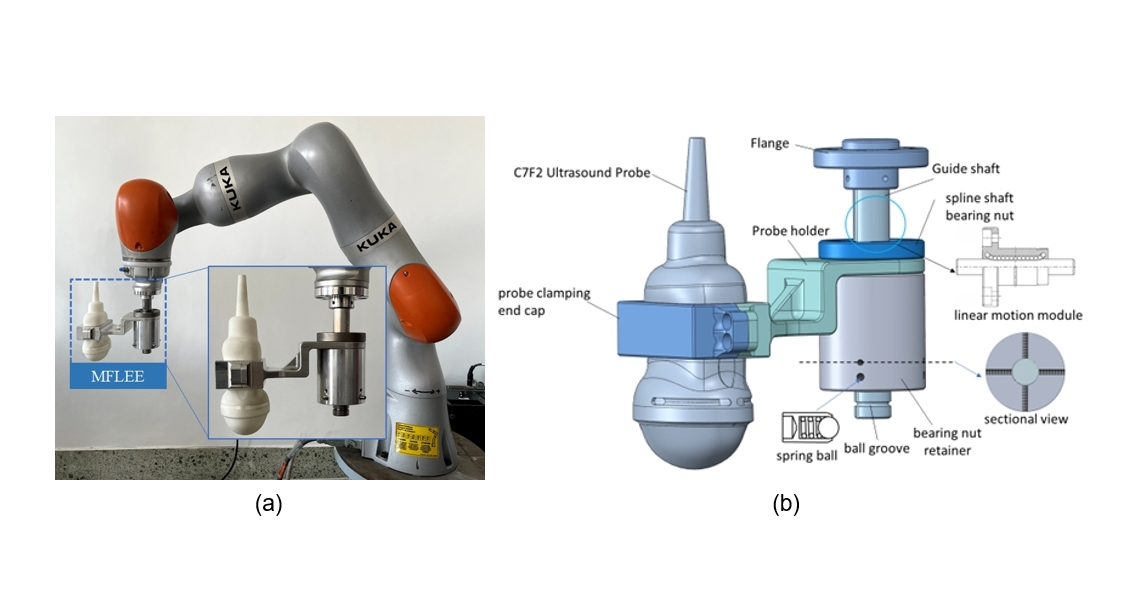
Innovative Design and Validation of an Ultrasound Examination Robot's End Effector with Passive Force Limitation Mechanism
Ziqi Gao, Yang Luo, Yunxiang Jiang, Xingang Zhao, Yiwen Zhao, Ning Li
2024 IEEE 14th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER)
|
Co-authored Publications |
|
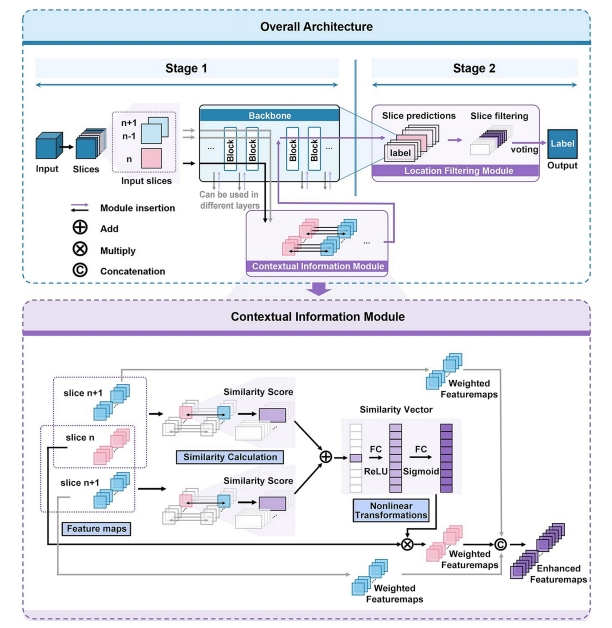
3D-CAM: a novel context-aware feature extraction framework for neurological disease classification
Yuhan Ying, Xin Huang, Guoli Song, Yiwen Zhao, Xingang Zhao, Lin Shi, Ziqi Gao, Andi Li, Tian Gao, Hua Lu, Guoguang Fan,
Frontiers in Neuroscience
3D-CAM: a novel context-aware feature extraction framework for neurological disease classification
|
Patents |
|
[1] 赵忆文, 高子奇,罗阳,姜运祥,王逍,赵新刚. 一种面向人形机器人上肢操作技能学习的数据收集平台[P]. 专利号:202510796707.6.
[2] 赵忆文, 高子奇,罗阳,姜运祥,赵新刚,李英立. 一种遥操作机器人主从手比例映射因子设计方法[P].专利号:202211409096.8.
[3] 赵忆文, 高子奇,罗阳,姜运祥,赵新刚,李英立. 一种超声检查机器人末端执行器[P].专利号:202211452172.3.
[4] 赵忆文,赵新刚, 高子奇,姜运祥,罗阳,张元林,李英立,江超,魏仁松,刘前前,孙锦程. 一种机器人末端移液夹持装置及机器人移液控制方法[P].专利号:202210538249.2.
[5] 赵忆文,孙锦程,魏仁松,罗阳,姜运祥,张元林,高子奇,江超,赵新刚. 一种用于无人实验室离心机的机器人自主作业控制方法[P].专利号:202210811113.4.
|
Projects |
|
Cube Reorientation by LeapHand
Cubes of different sizes were successfully reorientated around multiple axes by a LeapHand
Technologies: Deep Reinforcement Learning, Sim2Real, Motion Planning, ROS, Python
Webpage
|
|
Robot Teleoperation
UR Robots tele-operated by Foce Dimension haptic devices
Technologies: FK, IK, Motion Control, ROS, Python, CPP
Webpage | Code
|
|
Vision- and Force-Integrated Robotic Pipetting: Automated Tip Engagement, Ejection, and Liquid Handling
A solution to pipetting by a robot.
Technologies: Motion Control, Force Control, Vision Recognition, Integration of Vision and Force, ROS, CPP
Webpage | Patent
|
Education |

|
University of Chinese Academy of Sciences, China
2021.09 - Present
GPA: 3.78/4.0
PhD student in a consecutive program that transitions from Master's to Doctoral in Pattern Recognition and Intelligent Systems.
Advisor: Prof. Yiwen Zhao
|

|
Zhengzhou University, Zhengzhou, China.
2017.09 - 2021.07
GPA: 3.66/4.0, 87.38/100, Ranking: #1, 🏅 Honor Graduate
B.E. in Mechanical Engineering
|
|
Experience |

|
Fraunhofer IFF, Magdeburg, Germany
2024.09 - 2025.08
Visiting Student Researcher in Cognitive Robotics Group, Robotics System Department, Fraunhofer IFF
|

|
Brainco and Harvard University, Cambridge, Massachusetts, United States
2019.07
The Innovation Technology Camp
|
|
Honors and Awards
🏅Merit Student of University of Chinese Academy of Sciences, 2022.
🏅Outstanding Graduate of Zhengzhou University, 2021.
🏅Merit Student of Zhengzhou University, 2018, 2019, 2020, 2021.
🏅Outstanding Student Cadre of Zhengzhou University, 2018.
🏀🥈 Men’s Team Runner-up of the Graduate Basketball Tournament, Shenyang Institute of Automation, Chinese Academy of Sciences, 2024
🏀🥇🏆 Men’s Team Champion of the Graduate Basketball Tournament, Shenyang Institute of Automation, Chinese Academy of Sciences, 2023.
🏀🥉 Men’s Team Third Place in the Northeast Division of the “Keyuan Cup” Basketball Tournament, University of Chinese Academy of Sciences, 2023
💶The Chinese Academy of Sciences (CAS) Doctoral International Cooperative Training Program Scholarship (12 months * 1,350 , 2024/09 - 2025/08).
💴 The Graduate Academic Scholarship at the University of Chinese Academy of Sciences (9,600 CNY 2022; 13,000 CNY 2023; 10,800 CNY 2024).
💴Zhengzhou University Outstanding Student Scholarship First Prize (3 times * 1,850 CNY, 2018, 2019, 2021).
💴Zhengzhou University Outstanding Student Short-term Overseas Exchange Scholarship (38,000 CNY, 2019).
|
Miscellanies
During my spare time, I really enjoy Chinese calligraphy 🖌️, basketball 🏀, soccer ⚽, swimming 🏊🏼♂️, frisbee 🥏, and riding 🚴, and also have strong interests in history 📖, geography 🗺️ and languages. Moreover, I plan to learn how to sail a boat ⛵ in the future.
|
|